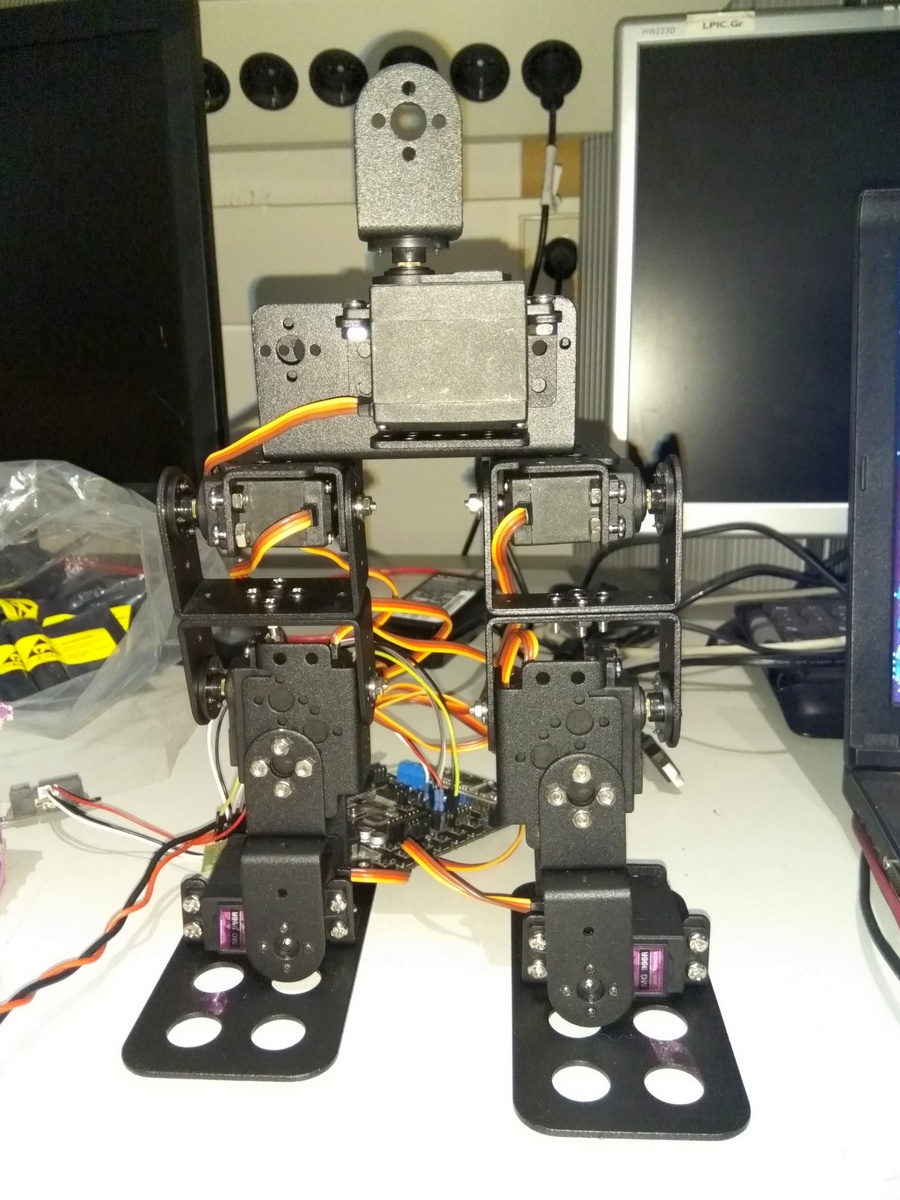
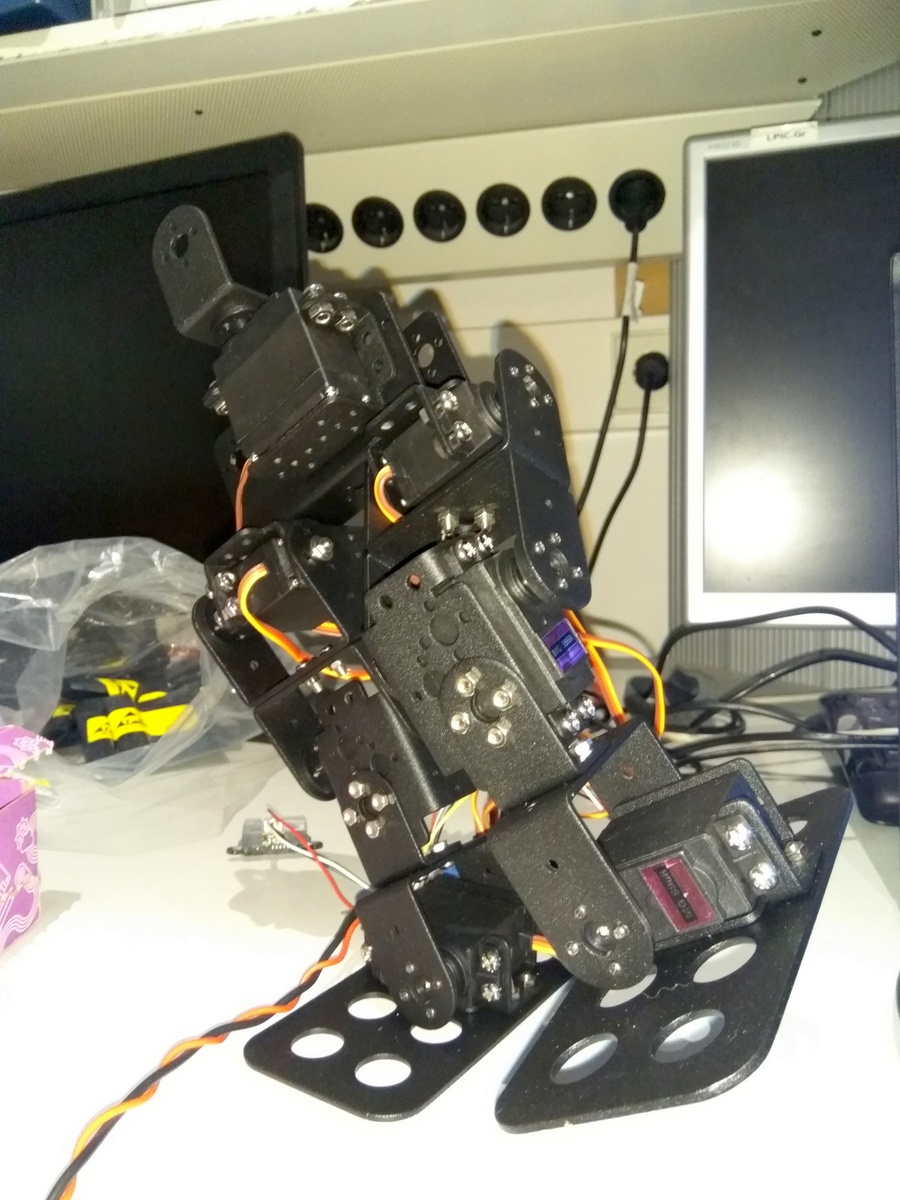
Am vergangenen Freitag stand mal wieder u.a. das Basteln im Vordergrund. Ein zweibeiniger Roboter (Biped) wurde zusammengeschraubt und zum Laufen gebracht.
Der Biped ist ein Nachbau des Lynxmotion BRAT, derzeit bestehend aus:
- Mechanische Teile aus einem SainSmart 17DOF Biped Black Educational Robot Kit
- 7x MG996R Servos
- DFRobot DFRduino RoMeo Robot Controller (Arduino Uno kompatibel)
- Arrexx Bluetooth Modul v1.1 (APC220 kompatibel)
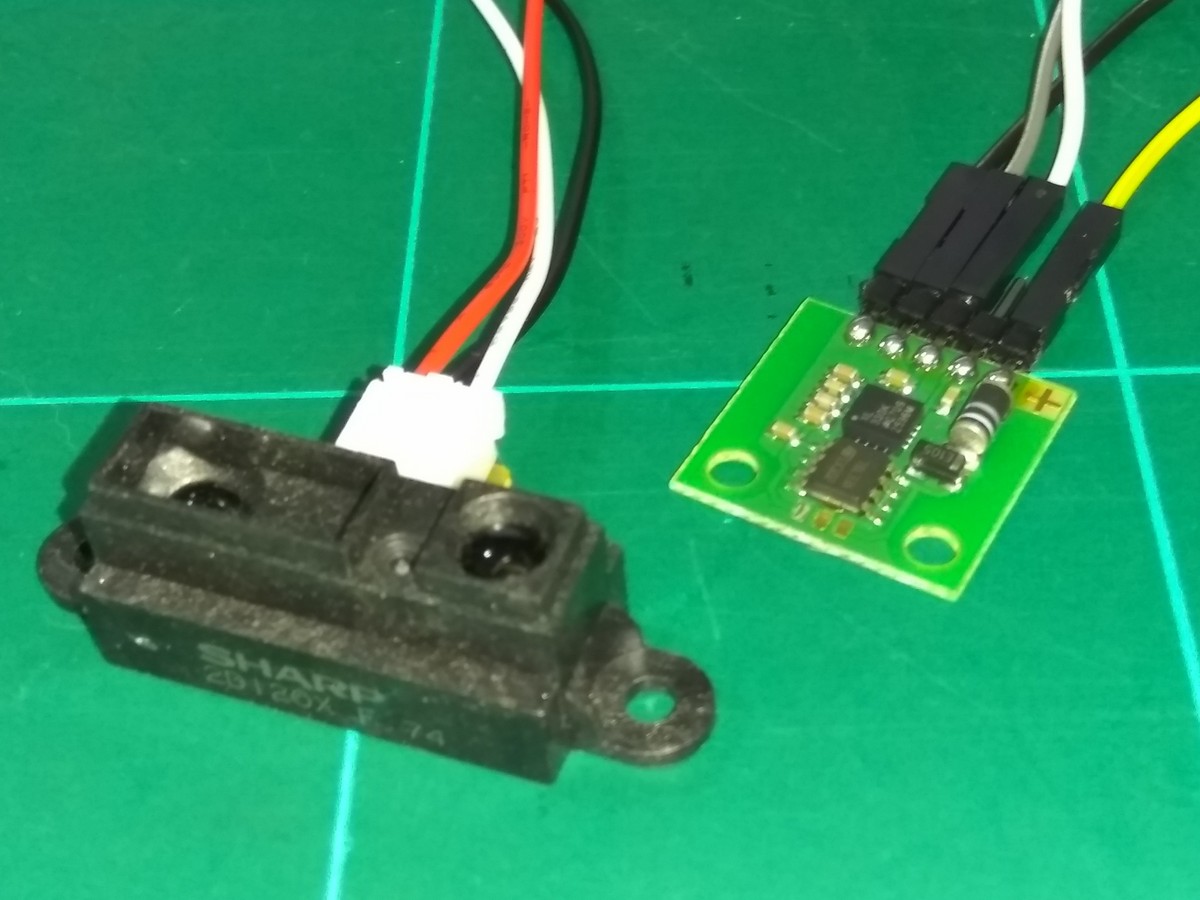
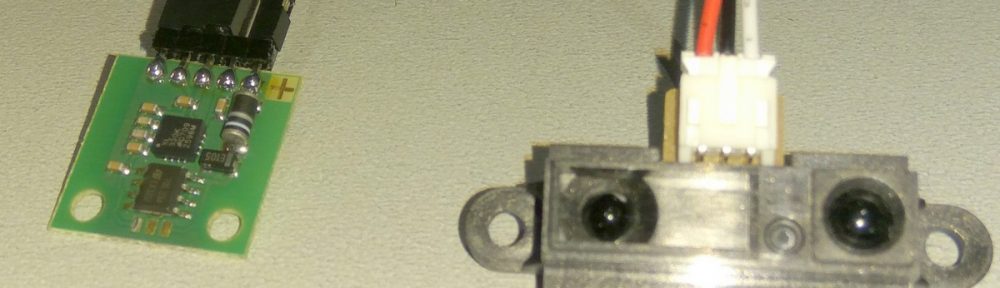
- Sharp GP2D120 Infrarot Distanzsensor
- MEMS1 analoger Lagesensor mit AD/li>
- 5x AA Zellen Akkupack 6V/2000mAh
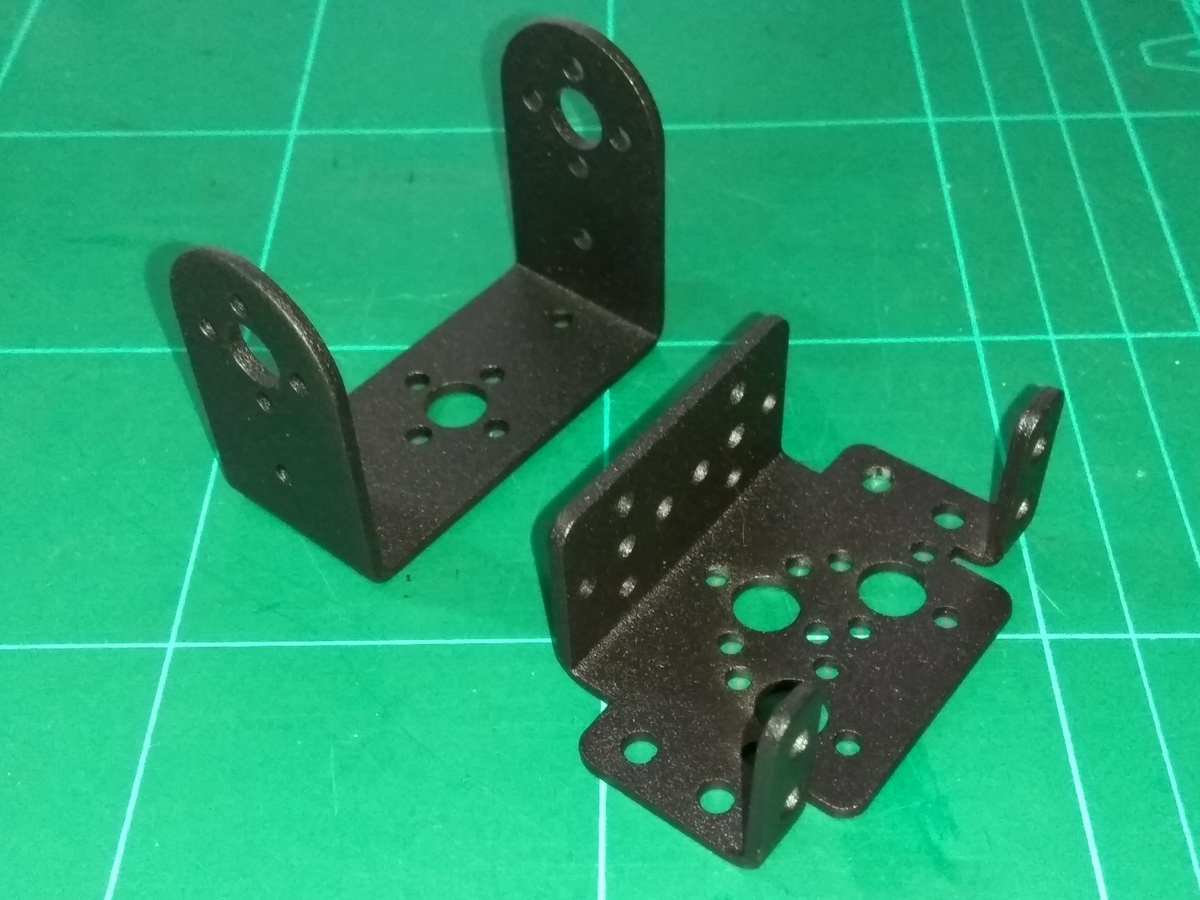
Mechanik
Die Mechanik ist recht stabil. Die Winkel und Servo Halterungen bestehen aus 2mm Alublech (pulverbeschichtet). Lediglich die Bohrungen für die Schrauben könnten 1/10 mm größer ausfallen. Die Gewinde leiden doch sehr, wenn man die Schrauben in die Bohrungen schraubt. Die kurzen M3x6 Schrauben sind für meinen Geschmack etwas zu kurz. Deshalb ist Schraubensicherungslack für alle Schraubverbindungen Pflicht. Der Zusammenbau fällt mit der Lynxmotion Anleitung sehr leicht.
Elektronik
Die Digital Servos sind Klone der beliebten TowerPro MG996R, haben doppelt kugelgelagerte Metallgetriebe und sollen ein Haltemoment von 12kg/cm bei 6V haben. Laut sind sie auf alle Fälle und ziehen auch ordentlich Strom (>500mA beim Drehen ohne Last). Wie sich das im längeren Betrieb auswirkt, wird sich noch zeigen.

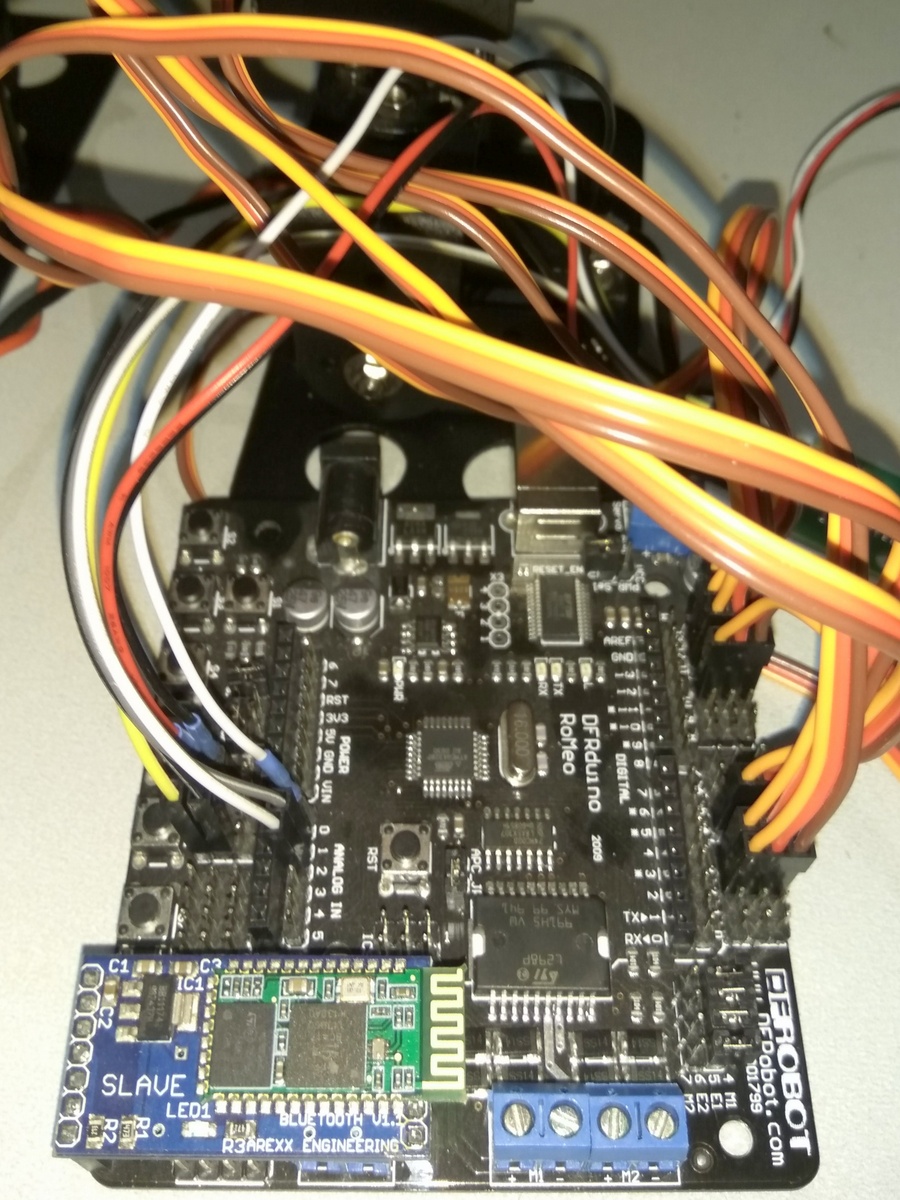
Derzeit liegt die Elektronik noch lose neben dem Roboter. Es fehlt noch eine geeignete Halterung. Über das Bluetooth Modul kann eine Drahtlose serielle Verbindung aufgebaut werden. Das DFRobot RoMeo Board verfügt über:
- alle IOs auf 3olige Steckverbinder herausgeführt
- getrennte Servo Stromversorgung für die Digital Pins
- L298 dual motor driver (hier nicht verwendet)
- 7 Tasten (5 davon über ienen Analog Pin ansprechbar)
- APC220 Steckplatz
Die Sensorik ist derzeit minimal. Der Sharp Infrarot Sensor bildet quasi den Kopf des Bipeds und sitzt später auf einem extra Servo, damit er horizontal geschwenkt werden kann. Damit kann der Roboter Hindernisse erkennen. Falls der Roboter mal umfällt, kann er an Hand des Lagesensors seine Lage bestimmen und sich entsprechend selbsttätig wieder aufrichten.