
An diesem Freitag ging es im eLAB u.a. um den Calliope-Mini, die deutsche Antwort auf den BBC micro:bit.
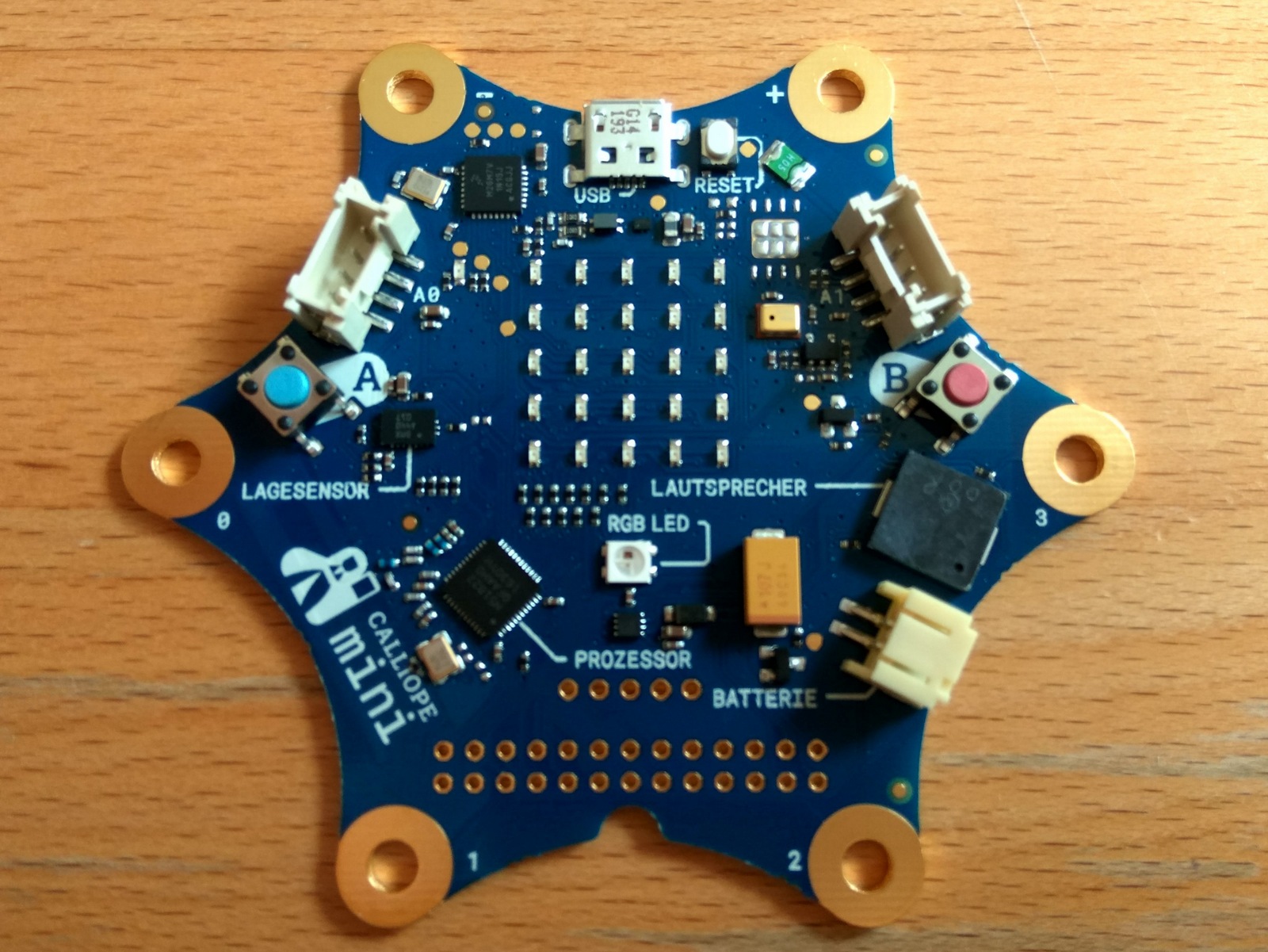
Calliope-Mini
Der Calliope-Mini ist ein kleiner Controller weitgehend kompatibel zum BBC Microbit. Der Calliope soll an deutschen Schulen eingesetzt werden, um Schülern den Einstieg in die Programmierung zu erleichtern. Ähnlich wie beim BBC micro:bit vom dem 1 Million Exemplare an Schulkinder der 7. Klasse ausgegeben wurden.
Gemeinsamkeiten micro:bit Calliope-Mini
Die gemeinsamen Bauteile bestehen aus:
- NRF51822, 32-Bit ARM Cortex M0 Prozessor
- Bluetooth Low Energy (BLE) und NRF 2.4GHz Funk
- 20 IOs 3.3V Digital, UART, I2C, PWM, SPI
- 5×5 LED Matrix
- Lagesensor, Kompass
- 2 Taster
- USB Interface
- 3.3V
Unterschiede micro:bit Calliope-Mini
Die Hauptunterschiede zwischen dem Calliope-Mini und dem BBC micro:bit sind neben den Abmessungen einige zusätzliche bzw. andere Hardware Komponenten:
- Motor Treiber
- Mikrofon
- Lautsprecher
- RGB LED
- 2 Anschlüsse für Seeed Grove Sensoren
- 2×13 Port Erweiterung (2.54mm Raster)
- anderer Lagesensor und Kompass
- anderer Pin Taste B
Aufgrund der unterschiedlichen Hardware laufen nicht alle micro:bit Programme problemlos auf dem Calliope.
Software
Programmieren lässt sich der Calliope Online im Browser über:
- Calliope mini Editor, einem einfachen Editor
- PXT, Blockly und JavaScript Editor
- OpenRoberta, Blockly Editor mit C++ Code Viewer
Die Online Editoren bieten recht einfache Möglichkeiten, um in die Programmierung einzusteigen. Insbesondere der PXT macht wie schon beim micro:bit einen sehr guten Eindruck. Der Editor ist umschaltbar zwischen der grafischen Blockly Programmierung und der textbasierten JavaScript Programmierung
OpenRoberta hat seinen Schwerpunkt eher in der Roboterprogrammierung. Es kann zwar auch von der grafischen Blockly Ansicht in die Code Ansicht umgeschaltet werden. Allerdings nur zur Ansicht, nicht zum Editieren.
Offline lässt sich der Calliope programmieren in:
- mBed C++
- MicroPython (mit Einschränkungen)
für die mBed C++ Entwickung wird Yotta benötigt. Yotta ist eine Python basierte Entwicklungs Toolchain.
MicroPython ist noch nicht für den Callipe angepasst. Aber viele Programme für den micro:bit lassen sich auch auf dem Calliope verwenden.
Calliope Roboter
Als erste echte Anwendung für den Calliope wurde ein kleiner Roboter gebaut, der sich über einen micro:bit fernsteuern lässt. Das Programm dazu basiert auf dem Calliope-Robot.

Der Erweiterungsport des Calliope wurde mit einem 2x13poligen stackable Header (vom Raspberry Pi 1) bestückt. Der 5-polige Motor Steckverbinder mit einen Arduino stackable Header versehen. So lassen sich alle Ports über Jumperkabel erreichen.
Pro & Contra
Die Vorteile des Calliope:
- diverse zusätzliche Bauteile wie Motor Controller, Mikrofon, Lautsprecher
- Bastlerfreundlicher Erweiterungsport
- Besser gegen Kurzschluss geschützte Ports
Die Nachteile des Calliope:
- Nur ein Motor Controller vorhanden. Motoren laufen nur in eine Richtung
- Micro:Bit wird besser unterstützt. Größere Community
- Teilweise inkompatibel zum micro:bit (Kompass, Lagesensor)